Hello!
My project CamDrive is intended to be an open source multi-axis control for time-lapse photography.
The current state of development can be traced in the CAM Drive project blog. CAM-Drive ProjektBlog
Currently, there is an Android app that already can control one axis.
For interested developers I uploaded the source code in my download section.
Unfortunately, I can not very well programming android apps and I would be really delighted if someone could help me there.
I would deliver some Camdrive-Prototypes for little money.
If you're interested or for any other questions, please send a mail to: r-tec [at]rohrhofer (dot) org
- The CamDrive working principe
- Basic_Information
- technical spezification CAMdrive-StepperNode
- The CamDrive Commandset
- Specific-features-Rev1.2
- Downloads
The CamDrive principle of operation

{youtube}2My9zONMP8A{/youtube}
Please watch video on Youtube to see all the video-comments.
{youtube}qCGj_iITBIw{/youtube}
First Bus communication demo
Basic Information:
What a CAM Drive can or can not do.
A CAMdrive node must be selected according to the motor.
That is:
Stepper motors need a Stepper Controller of CAMDrive.
Normal DC motors need a CAMdrive-BrushedDCMotor controller.
To connect with Bluetooth, only one node needs the Bluetooth module. The remaining nodes are wired via the bus.
There is only one power supply required! No matter which node is connected, it supplies the remaining nodes and motors on the bus
It does not matter on which node the camera is connected, it all work "Camera" jacks simultaneously.
The bus connection is established via a standard network cable (patch cord).
Technical spezification: (preliminary!)

CAMdrive - StepperNode rev1.2
Supply voltage: 12-24VDC (internally protected against reverse polarity and surge)
1 Cammera trigger galv. (3.5mm Stereo Jack)
2 bus connectors RJ45
Stepper Motor Driver: 800mA / coil, over temperature, short circuit and under voltage protection
2 limit switch inputs
Dimensions: 100x61x24mm (LxWxH)
Weight: 85gr
current consumption:
Standby without motor/ without BT-Module : 23mA
Standby without motor/ with BT-Module : 90mA
with motor in movement +300mA -> motor in standby +50mA
The CAMdrive Commandset


Commands
I1 initializesto the left untillimit switches
I0 initializesto the right untillimit switches
I9 setserror flagon the controllerback
H0 (undocumented for now)
Lxxxxx drives to left for „xxxxx“ steps
Rxxxxx drives to right for „xxxxx“ steps
Fxxxxx send focus signal for „xxxxx“ milliseconds
Sxxxxx send shutter signal and wait for „xxxxx“ milliseconds
Examples:
"& 1R100" moves to the right 100 steps
"& 1L84" moves to the left 84 steps
"& 1F140" sends the signal 140ms long focus on the Camera
"& 1S50" sends the trigger signal to the Camera and wait for 50ms
Specific features Rev1.2
The communication of the CamDirve-Prototypes V1.2 work with following shematic.

The schematic of V1.2 is available in the downloads.
![]()
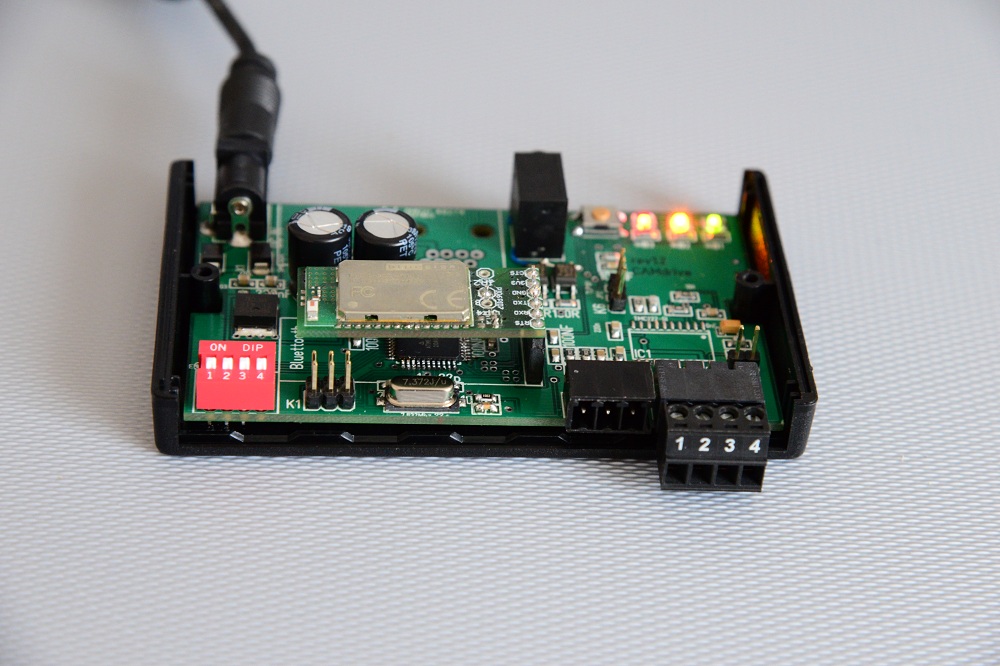
Here is a photo of the first built CamDrive V1.2 with attached Bluetooth module.
Although it lacks certain components such as for example the motor controller and the bus interface, it runs so far but quite decent.
{jcomments on}
Comments powered by CComment